

モバイルロボット LDシリーズ
更新日:


自らマップを作って動き回る自動搬送ロボット(AMR)
3つのキーテクノロジー
・ぶつからない進路を自ら選んで走行
・最大100台を操り、ムダなく運行
・最短半日で、ライン変更に対応
概要・特長
ぶつからない進路を自ら選んで走行
モバイルロボットは、内蔵しているレーザスキャナで人や障害物を検知し、どのように避けるかをリアルタイムに考えながら、ぶつかることなくゴールまで安全に運びます。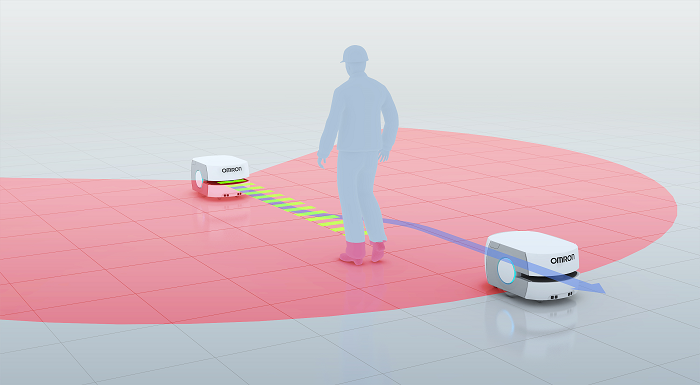
障害物を避けつつ搬送時間は短く、独自アルゴリズムの自律走行
マップ上のゴールを設定・指示するだけで、独自のルート検索アルゴリズムによりもっとも効率的なルートを自動で選択して走行します。ルート検索はリアルタイムに実行しているので、突然、障害物が出現しても自動で別ルート検索し、ゴールまで確実に走行します。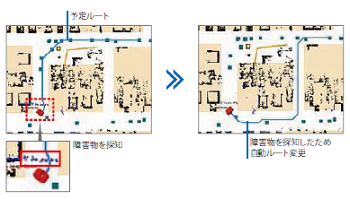
衝突防止機能で安全に走行、充実のセーフティ機能
グローバルの安全規格に準拠(EN1525/ANSI B56.5/JIS D 6802)した設計。高輝度のライトディスクやバンパー、障害物レーザスキャナなど充実の安全機能を搭載しています。
最大100台を操り、ムダなく運行
最大100台のモバイルロボットの現在位置、空き状況を、専用コントローラ「Fleet Manager EM2100」が常に把握し、最適な配送を管理できます。セル生産でもコンベアラインでも無駄な搬送動作や搬送ミスを防ぎ工程間の停滞を削減します。
搬送要求を発生順にオーダーするだけ、Jobベースフリート制御
モバイルロボットを増やすほど複雑になる設置やルート設定を、専用コントローラ「Fleet Manager EM2100」が一手に引き受けます。生産実行システムからの「工程AからBへ搬送」といった指示をJobとして受けとり、最大100台のモバイルロボットを自動で配車します。
狭い通路でも渋滞しないよう交通整理、トラフィックコントロール機能
同じゴールに向かう複数のモバイルロボットが狭いスペースに集中しても、渋滞、スタックすることはありません。スタンドバイゴールを設定するだけで渋滞やスタックを回避するように順番に運行指示を行います。また、Non-FIFO機能によるフリートの最適制御など、豊富なトラフィックコントロール機能でスループットの最大化を実現します。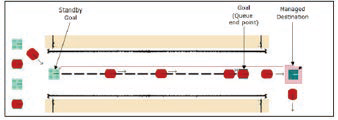
最短半日で、ライン変更に対応
モバイルロボットを走行させるだけで、周囲環境の情報を収集し、移動の手がかりとなるマップをモバイルロボット自らが作成します。工場レイアウトのCAD図がなくても、頻繁なライン変更があっても、移動範囲のマップを短時間で簡単に制作できます。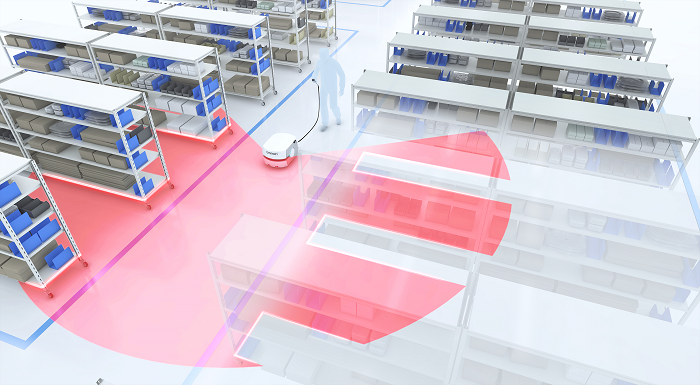
現場環境に合わせた運行制御を簡単に設定、MobilePlanner
作成したマップをカスタマイズできる豊富な機能を、モバイルロボット統合ソフトウェア「MobilePlanner」に操作しやすいグラフィカルな画面でご用意しています。たとえば図に示すような項目をマップ上で簡単に設定できます。また、現場環境の一部にレイアウト変更があった場合は、そのエリアだけを再度走行して状況をスキャンし、既存のマップに取り込むことも可能です。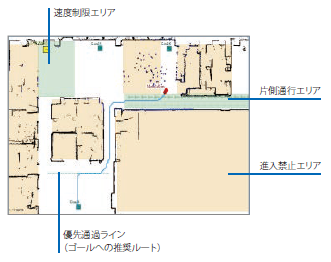
ラインを止めずにロボットを増設、ロボット間マップ共有
マップ情報やJob内容はすべて専用コントローラ「Fleet Manager EM2100」が管理するので、ロボットにはIPアドレスを割り当てるだけで簡単に追加可能です。生産ラインの停止は不要です。
種類・価格
モバイルロボットLDプラットフォーム
| タイプ | 商品名称 | 最大 積載 重量 |
最高 走行 速度 |
付属品 | 形式 | 標準 価格 |
|
| OEM | LD-60 | 60kg | 1.8m/s | 単体 | - | 37032-00000 | オープン 価格 |
| バンドル | ・ドッキングステーション (12477-000) ・バッテリーパワーケーブル(0.45m) (12676-000L) |
37032-00002 | オープン 価格 |
||||
| スタータ キット |
・ドッキングステーション (12477-000) ・バッテリーパワーケーブル(0.45m) (12676-000L) ・ジョイスティック(13558-000) ・トッププレート(12944-000) |
37032-10004 | オープン 価格 |
||||
| LD-90 | 90kg | 1.35m/s | 単体 | - | 37042-00000 | オープン 価格 |
|
| バンドル | ・ドッキングステーション (12477-000) ・バッテリーパワーケーブル(0.45m) (12676-000L) |
37042-00002 | オープン 価格 |
||||
| スタータ キット |
・ドッキングステーション (12477-000) ・バッテリーパワーケーブル(0.45m) (12676-000L) ・ジョイスティック(13558-000) ・トッププレート(12944-000) |
37042-10004 | オープン 価格 |
||||
| LD-250 | 250kg | 1.2 m/s | 単体 | - | 37222-00000 | オープン 価格 |
|
| バンドル | ・ドッキングステーション (12477-000) ・バッテリーパワーケーブル(0.45m) (12676-000L |
37222-00002 | オープン 価格 |
||||
| スタータ キット |
・ドッキングステーション (12477-000) ・バッテリーパワーケーブル(0.45m) (12676-000L) ・ジョイスティック(13558-000) ・トッププレート(20458-002) |
37222-10004 | オープン 価格 |
||||
| カート トランス ポータ |
LD-105CT | 105kg | 1.35m/s | 単体 | ・タッチスクリーン(13605-000) ・サイドレーザセンサ(13456-000) |
37142-00010 | オープン 価格 |
| バンドル | ・タッチスクリーン(13605-000) ・サイドレーザセンサ(13456-000) ・ドッキングステーション (12477-050) ・バッテリーパワーケーブル(0.45m) (12676-000L) |
37142-00012 | オープン 価格 |
||||
| スタータ キット |
・タッチスクリーン(13605-000) ・サイドレーザセンサ(13456-000) ・ドッキングステーション (12477-050) ・バッテリーパワーケーブル(0.45m) (12676-000L) ・Acuity localization(13700-000) ・ジョイスティック(13558-000) ・カート(75020-000) |
37142-01014 | オープン 価格 |
||||
| LD-130CT | 130kg | 0.9m/s | 単体 | ・タッチスクリーン(13605-000) ・サイドレーザセンサ(13456-000) |
37162-00010 | オープン 価格 |
|
| バンドル | ・タッチスクリーン(13605-000) ・サイドレーザセンサ(13456-000) ・ドッキングステーション (12477-050) ・バッテリーパワーケーブル(0.45m) (12676-000L) |
37162-00012 | オープン 価格 |
||||
| スタータ キット |
・タッチスクリーン(13605-000) ・サイドレーザセンサ(13456-000) ・ドッキングステーション (12477-050) ・バッテリーパワーケーブル(0.45m) (12676-000L) ・Acuity localization(13700-000) ・ジョイスティック(13558-000) ・カート(75020-000) |
37162-01014 | オープン 価格 |
||||
注1. フリート制御する際、従来製品(37□□1-0□0□□)との混在はできません。フリート制御で混在ができないこと以外は、従来製品(37□□1-0□0□□)との仕様の違いはありません。
Fleet Operations Workspace(FLOW)関連商品
| 商品名称 | 構成 / 付属品 | 形式 | 標準価格 |
| プライマリFLOW Core・ ライセンス 1年 |
プライマリーFLOWコア・ライセンスの1年利用。 更新可能。 |
20271-800 | オープン価格 |
| プライマリFLOW Core・ ライセンス 5年 |
プライマリーFLOWコア・ライセンスの5年利用。 更新可能。 |
20271-806 | オープン価格 |
| セカンダリFLOW Core・ ライセンス 1年 |
セカンダリーFLOWコア・ライセンスの1年利用。 更新可能。 |
20271-802 | オープン価格 |
| セカンダリFLOW Core・ ライセンス 5年 |
セカンダリーFLOWコア・ライセンスの5年利用。 更新可能。 |
20271-807 | オープン価格 |
| プライマリーFleet Manager | 120日間のFLOWライセンス付きEM2100 | 20271-900 | オープン価格 |
| セカンダリーFleet Manager | 120日間のFLOWライセンス付きEM2100 | 20271-901 | オープン価格 |
| バンドル、Fleet Simulator | Fleet Simulator の恒久ライセンスとEM2100 (ハードウエア)を含みます |
20271-903 | オープン価格 |
| ライセンス、Fleet Simulator | Fleet Simulator の恒久ライセンスのみ。 (EM2100は含まれません。) |
20271-804 | オープン価格 |
*Fieet Operations Workspace (FLOW)Coreソフトウエアの最新バージョンお入手するには、弊社営業員にお問い合わせください。ソフトウエアのアップグレードにアクセスするには、有効なサブスクリプションが必要です。
*更新せず1年間のサブスクリプションライセンスの期限が切れると、ライセンスが更新されるまで、フリート管理機能は停止されます。
*1年間の更新を4年連続更新(合計5年間)された場合、または5年間のライセンスを購入した後、すべてのフリート管理機能は引き続きサブスクリプションの更新を必要とせずに動作します。ただし、バグの修正、機能のアップグレード、性能の向上といったソフトウエアのアップグレードには、引き続き有効なサブスクリプションが必要です。
アクセサリ
| 商品名称 | 仕様 | 付属品 | 形式 | 標準価格 |
| バッテリ | LD-60/90/ 105CT130CT用 |
- | 18578-000 | オープン 価格 |
| LD-250用 | - | 20452-000 | オープン 価格 |
|
| ドッキングステーション | - | ドッキングステーション ACパワーケーブル |
12477-000 | オープン 価格 |
| 壁掛けブラケット | 壁掛けブラケット(カートトランスポータ用) | 12477-050 | オープン 価格 |
|
| ジョイスティック | ケーブル長: 0.6m~3m |
- | 13558-000 | オープン 価格 |
| ブレークアウト ケーブル |
- | DB44HDブレークアウトケーブル (0.76m)(デジ タルI/Oインタフェース用 D-SUB44ピンケーブル (0.76m) ) |
14165-000 | オープン 価格 |
| トッププレート | OEMタイプ用 トップカバー (LD-60/90用) |
- | 12944-000 | オープン 価格 |
| トッププレート | OEMタイプ用 トップカバー (LD-250用) |
- | 20458-002 | オープン 価格 |
| カート | - | - | 75020-000 | オープン 価格 |
| バッテリパワーケーブル | ケーブル長: 0.45 m |
- | 12676-000L | オープン 価格 |
定格・性能
モバイルロボットLDプラットフォーム OEM LD-60/90、カートトランスポータ
| 項目 | OEM LD-60/90 | カートトランスポータ | 備考 | |||
| 37032-□□□□□ | 37042-□□□□□ | 37142-□□□□□ | 37162-□□□□□ | |||
| 本体材質 | ポリカーボネイト | |||||
| 外形寸法(L×W×H) | 699 × 500 × 383mm | 894 × 1074 × 1394mm * | * WiFiアンテナの高さを含みます。 | |||
| 質量(バッテリ付) | 62kg | 81kg(モバイルロボット)/23kg(カート) | ||||
| 使用環境 | 周囲温度範囲 | 5~40 ℃ | ||||
| 周囲湿度範囲 | 5~95%(結露なきこと) | |||||
| 動作環境 | 室内用のみ、過度の粉塵、腐食性ガスなきこと | 直射日光はセーフティレーザ異常の 原因となることがあります。 |
||||
| 保護構造 | IP20 | |||||
| クリーンルームの 清浄度 |
Fedクラス100、ISOクラス5 | なし | ||||
| フロア条件 | フロア要件 | リノリウム、エポキシ、またはコンクリート(水、オイル、汚れなきこと) | ||||
| 最小フロア平坦度 | FF25 (ACI 117 基準) * | * ACI 117はコンクリートフロア について、American Concrete Institute(アメリカコンクリート 学会)が定める基準です。 FFは平坦度で、FLは水平度です。 FF値が高いほど、フロアは平坦 です。FF25は比較的厳しくない 仕様です。 |
||||
| 最大許容段差 | 15 mm max.*1 | 10 mm max.*1 | 5 mm max.*2 | 5 mm max.*2 | *1 これらの隙間を横断するため には、LD-60のスピードは250~ 300mm/s、LD-90のスピードは 250mm/sである必要があります。 頻繁に、あるいはより速いス ピードで隙間を横断すると、ド ライブトレイン構成部品の寿命 を縮めます。上記より遅いス ピードでは、隙間を横断できな い可能性があります。ステップ は、滑らかで丸まったプロファ イルを有している必要があります。 *2 カート付きのトランスポータ は、250mm/sのスピードで5mm の隙間または段差を横断可能で すが、これを通常の使用とみな さないでください。 何度もこのような隙間や段差を 横断すると、ドライブトレイン 構成部品の寿命を縮めます。 |
|
| 溝の最大許容幅 | 15 mm max. | 15 mm max. | 5 mm max.*2 | 5 mm max.*2 | ||
| 最大勾配 | 1:12以下(60kg max.) 60kgを超える場合はフラットフロアのみ |
フラットフロアのみ | ||||
| ナビゲー ション |
ルーティング | 作業環境のマッピングに基づいて、セーフティスキャニングレーザセンサを使用して自 己位置推定することにより、自律的なルーティングを実現します。 |
||||
| 作業環境マップ 作成方法 |
作業環境内でモバイルロボットを走行させて、情報収集完了後、スキャンしたデータを MobilePlannerへ取り込みします。 |
|||||
| ペイロード | 最大ペイロード | 60 kg | 90 kg | 105 kg * | 130 kg * | *カート質量は含みません。 |
| 移動性 | 最大直進速度 | 1800 mm/s | 1350 mm/s | 1350 mm/s | 900 mm/s | |
| 最大回転速度 | 180°/s | 180°/s | 100°/s | |||
| 停止位置精度 | ± 100 mm 位置*、± 2° 回転 | * オプション(High Accuracy Positioning System)を使う時、 停止位置精度は±10 mm :位 置、±0.5°:回転 オプション(Cell Alignment Positioning System)を使う時、 停止位置精度は±25 mm :位 置、±1°:回転 |
||||
| 駆動部車輪 | 材質 | ノンマーキングナイロン発泡充填ゴム、非導電性 | ||||
| サイズ | 公称 直径200 × 50mm、2個 | |||||
| 受動キャス タ |
材質 | ポリオレフィン上に導電性熱可塑性ゴム | ||||
| サイズ | 公称 直径75 × 41mm、4個 | |||||
| 電源 | バッテリ | DC22~30V | ||||
| 容量 | 72Ah バッテリセル公称値 | |||||
| 走行時間 | 約15時間(連続) | (ペイロードなし) | ||||
| 充電時間 | 約4時間(比率5:1) | |||||
| バッテリ寿命 | 2000再充電サイクル(バッテリセル公称値) | |||||
| 充電方法 | 自動充電/手動充電 | |||||
| バッテリ出力 | DC5V±5%、1A AUX電源 DC12V±5%、1A AUX電源 DC20V±5%、1A AUX電源 DC22~30V、4A ユーザ用バッテリ電源×2 DC22~30V、10A ユーザ用バッテリ電源 * DC22~30V、10A 安全用バッテリ電源 * |
DC5V、12V、20V、22~30Vの 電源を外部機器に供給できます。 * ユーザ用バッテリ電源10Aと安 全用バッテリ電源10A |
||||
| 基準 | Harmonized Standard |
EN IS0 12100 / EN ISO 13849-1 / EN 60204-1 | ||||
| Relevant Standard |
EN 1525 / ANSI B56.5 | |||||
| ワイヤレス | IEEE 802.11 a/b/g | |||||
| セーフティ 機能 |
セーフティ スキャニング レーザセンサ |
正面に1台 クラス1 PLd(ISO13849-1) 検出距離:15m 検出角度:240° |
||||
| 非常停止スイッチ | オペレータパネルに1個 | HMIポストタッチスクリーンに1個、 オペレータパネルに1個 |
||||
| バックソナー | プラットフォーム背面に2ペア、2m範囲 | ソナーは協調動作する送信部と 受信部のペアから構成されます。 |
||||
| フロントバンパー | プラットフォームの正面に1個、センサ2セット付 | |||||
| ローフロントレー ザセンサ |
プラットフォームの正面に1台 クラス1 検出距離:4m 検出角度:126° |
|||||
| サイドレーザセン サ |
オプション * | MIポストの水平チューブに2台付き クラス1 検出距離:4m 検出角度:270° |
* ペイロードストラクチャの側面 に2台、ユーザ取付けとなります。 |
|||
| ライトディスク | 両側にライトディスク付き | 両側にライトディスク付き、HMIポスト上 ビーコン付き |
||||
| スピーカー | 3.5インチ、最大80W | |||||
| 操作インタ フェース |
タッチスクリーン | 対角3.5インチ、カラーTFT 320 × 240画素 256Kカラースクリーン |
7.0インチ、TFT LCDタッチパネル、18/24 ビットRGB |
|||
| ボタン | ONボタン:緑 、OFFボタン : 赤 Brake-release(ブレーキ解放)ボタン: オ レンジ、 キースイッチ*(OFFボタン無効 化) |
ONボタン:緑 、OFFボタン : 赤 Brake-release(ブレーキ解放)ボタン : オ レンジ、 キースイッチ*(OFFボタン無効化)、 ラッチ/アンラッチボタン |
* キースイッチは、予期せぬ シャットダウンや不正使用を防 ぐためにOFFボタンを無効化す るために使えます。 |
|||
| ユーザイン タフェース |
ワイヤレス | IEEE 802.11 a/b/g | ||||
| イーサネットポー ト |
1 × ユーザLAN、1 × メンテナンスLAN、Auto-MDIX | |||||
| シリアル | RS-232 × 2 | |||||
| デジタルI/O | 入力16点、出力16点 | |||||
| アナログI/O | 入力8点(0~30V)、出力4点(0~20V) | |||||
| オーディオ | デジタルオーディオ、オーディオ入力/オーディオ出力 | |||||
| カートラッ チング |
ラッチング方法 | - | 自動 | |||
モバイルロボットLDプラットフォーム OEM LD-250
| 項目 | OEM LD-250 | 備考 | ||
| 37222-□000□ | ||||
| 本体材質 | アルミニウム | |||
| 外形寸法(L×W×H) | 963 ×718 × 383mm | *トッププレートまでの高さ。 | ||
| 質量(バッテリ付) | 148kg(バッテリ入り)、129kg(バッテリ抜き) | |||
| 使用環境 | 周囲温度範囲 | 5~40 °C | ||
| 周囲湿度範囲 | 5~95%(結露なきこと) | |||
| 動作環境 | 室内用のみ、過度の粉塵、腐食性ガスなきこと | 直射日光はセーフティレーザ異 常の原因となることがあります。 |
||
| 保護構造 | IP20 | |||
| クリーンルームの 清浄度 |
Fedクラス100、ISOクラス5 | |||
| フロア条件 | フロア要件 | リノリウム、エポキシ、またはコンクリート(水、オイル、汚れなきこと) | ||
| 最小フロア平坦度 | FF25 (ACI 117 基準)* | * ACI 117はコンクリートフロア について、American Concrete Institute(アメリカコンクリート 学会)が定める基準です。 FF平坦度で、FL水平度です。FF 値が高いほど、フロアは平坦で す。FF25は比較的厳しくない仕 様です。 |
||
| 最大許容段差 | 10mm max.* | * LD-250のレーザーとバッテリ のパフォーマンスを最適化する ためには、10mmの段差を 600mm/s以下で走行する必要が あります。 |
||
| 溝の最大許容幅 | 15 mm max. | |||
| 最大勾配 | 1:12以下(60kg max.) 60kgを超える場合はフラットフロアのみ |
フラットフロアのみ | ||
| ナビゲー ション |
ルーティング | 作業環境のマッピングに基づいて、セーフティスキャニングレーザセンサを使用して自 己位置推定することにより、自律的なルーティングを実現します。 |
||
| 作業環境マップ 作成方法 |
作業環境内でモバイルロボットを走行させて、情報収集完了後、スキャンしたデータを MobilePlannerへ取り込みします。 |
|||
| ペイロード | 最大ペイロード | 250 kg | ||
| 移動性 | 最大直進速度 | 1200 mm/s | ||
| 最大回転速度 | 120°/s | |||
| 停止位置精度 | ± 100 mm 位置*、± 2° 回転 | * オプション(High Accuracy Positioning System)を使う時、 停止位置精度は±10 mm :位 置、±0.5°:回転 オプション(Cell Alignment Positioning System)を使う時、 停止位置精度は±25 mm :位 置、±1°:回転 |
||
| 駆動部車輪 | 材質 | アルミニウム、ポリウレタン樹脂のトレッド | ||
| サイズ | 公称 直径200 × 50mm、2個 | |||
| 受動キャス タ |
材質 | ポリオレフィン上に導電性熱可塑性ゴム | ||
| サイズ | 公称 直径127 × 51mm、4個 | |||
| 電源 | バッテリ | DC22~30V | ||
| 容量 | 72Ah バッテリセル公称値 | |||
| 走行時間 | 約13時間(連続) | (ペイロードなし) | ||
| 充電時間 | 約4時間(比率4:1) | |||
| バッテリ寿命 | 2000再充電サイクル(バッテリセル公称値) | |||
| 充電方法 | 自動充電/手動充電 | |||
| バッテリ出力 | DC5V±5%、1A AUX電源 DC12V±5%、1A AUX電源 DC20V±5%、1A AUX電源 DC22~30V、4A ユーザ用バッテリ電源×2 DC22~30V、10A ユーザ用バッテリ電源 * DC22~30V、10A 安全用バッテリ電源 * |
DC5V、12V、20V、22~30Vの 電源を外部機器に供給できます。 * ユーザ用バッテリ電源10Aと安 全用バッテリ電源10A |
||
| 基準 | Harmonized Standard |
EN IS0 12100 / EN ISO 13849-1 / EN 60204-1 | ||
| Relevant Standard |
EN 1525 / ANSI B56.5 | |||
| ワイヤレス | IEEE 802.11 a/b/g | |||
| 操作インタ フェース |
タッチスクリーン | 対角3.5インチ、カラーTFT 320 × 240画素 カラースクリーン |
||
| ボタン | ONボタン:緑 、OFFボタン : 赤 Brake-release(ブレーキ解放)ボタン: オレンジ、 キースイッチ*(OFFボタン無効化) |
* キースイッチは、予期せぬ シャットダウンや不正使用を防 ぐためにOFFボタンを無効化す るために使えます。 |
||
| ユーザイン タフェース |
ワイヤレス | IEEE 802.11 a/b/g | ||
| イーサネットポー ト |
1 × ユーザLAN、1 × メンテナンスLAN、Auto-MDIX | |||
| シリアル | RS-232 × 2 | |||
| デジタルI/O | 入力16点、出力16点 | |||
| アナログI/O | 入力8点(0~30V)、出力4点(0~20V) | |||
| オーディオ | デジタルオーディオ、オーディオ入力/オーディオ出力 | |||
| カートラッ チング |
ラッチング方法 | - | ||
MobilePlannerソフトウエア
| OS | Windows 10(32ビット版、64ビット版) |
| CPU | 1.5GHz Dual-core CPU 推奨 |
| RAM | 1.5GB以上(4GB以上推奨) |
| SDDまたはHDDの空き容量 | 空き容量200MB以上 |
| GPU | 256MB以上 |
| ディスプレイ | XGA 1024 × 768、1600万色 |
| サポート言語 | 日本語、英語、ドイツ語、イタリア語、韓国語、スペイン語、簡体字、繁体字 |
注1. ソフトウエアの最新バージョンは、オムロンWebサイトよりダウンロードいただけます。
EM2100
※2024年5月末販売終了
| 形式 | 20271-900 (プライマリーFleet Manager) ※ 20271-901 (セカンダリーFleet Manager)※ 20271-903(Fleet Simulator ライセンス付き。 FLOWライセンスは含まれません。)※ |
| 外形寸法- W×D×H | 430.0×495.3×43.7 mm |
| 質量 | 9.1 kg |
| 取付方法 | 標準19インチラック、1Uサイズ |
| 入力電圧 | AC100~240V * |
| 最大消費電力 | 200W |
| 動作温度範囲 | 10~35 °C |
| 保管および出荷時の温度 | -25~60 °C |
| 動作湿度範囲 | 8~90%(結露なし) |
| 保管および輸送湿度範 | 5~95%(結露なし) |
| 筐体の保護構造 | IP20 |
| CPU | Intel® Xeon® CPU |
| メモリ | 32 GB DDR3 |
| ストレージ | 60 GB SSD |
| アーカイブストレージ | 4 TB HDD |
| 通信ポート | 10/100/1000 Ethernet×4、USB×4、VGA |
| ステータスディスプレイ | マルチセグメントLCD |
* 標準100W
バッテリ
| 型式 |
18578-000(LD-60/90/105CT/130CT) |
| 走行時間(ペイロードなし) | 約15時間(連続) |
| 質量 | 19 kg |
| 電圧 | DC22~30V |
| 容量 | 72Ah(バッテリセル公称値) |
| 充電時間 | 約4時間 |
| 寿命 | 2000回80% DOD(バッテリセル公称値) 16時間/日、5日/週、約7年 毎日19時間(フルタイム)で約4年 |
ドッキングステーション
| 形式 | 12477-0□0 |
| 電流 | 8 A *1 |
| コンタクト部 | 2ピン |
| 電圧 | AC100~240V, 50/60Hz |
| 電力消費 | 800W |
| 湿度 | 5~95%(結露なきこと) |
| 温度 | 5~40°C |
| 外形寸法 (W × D × H) | 349 × 369 × 315 mm (495 × 495.5 × 317 mm) *2 |
| 質量 | 8.2 kg |
| 設置 | フロアに直接設置、壁ブラケット(付属品)、 または付属フロアプレートによりフロア上に設置(フリースタンディング) |
| インジケータ | 電源ON:青 充電中:黄 |
| コネクタ | プラットフォーム外部でのバッテリ充電用 |
*1 温度ヒューズをAC 電源スイッチに内蔵(旧式ドックでは、スイッチに10Aタイムラグヒューズ)
*2 ( ) フロアプレート付き
ジョイスティック
| 形式 | 13558-000 |
| 質量 | 550g |
| 保護構造 | IP56 |
カート
| 形式 | 75020-000 |
| 外形寸法 (L × W × H) | 592 × 846 × 480 mm |
| 質量 | 23 kg |
| 保護構造 | ESP定格 |
| 受動キャスタ | ばね式、正面:2、背面:2 |
| キャスタ寸法 | 公称100mm |
| キャスタブレーキ | 背面キャスタ:2 |
機器構成
各種用途にフレキシブル対応
お客様の用途に合わせた各種機器との組み合わせにも対応します
